29. < スーパーバイクは加速の限界に達した? 制御 >
<発進、クラッチ>
これがけっこう厄介です、クラッチを離していってどういうループで滑りが減って車速が上がっていくのをモデルにするのは大変だし今回の目的には重要ではないので簡単にしました。
それはクラッチを離すまでを2秒としてその間8m/s2で加速するというものです。スタート時には車速が低すぎてクラッチを繋ぐとエンジンが止まってしまうのでエンジンは高回転に保ったままクラッチを滑らせて伝達トルクをコントロールしているわけで、伝達トルクつまりは加速度を制御して高い値に保つようにするのが0-400加速の発進だろうと。
8m/s2の加速度は1G弱です、かなーり高い加速度ですからまあそんなすごいクラッチコントロールは難しいでしょう、でも後に述べる理由で2秒も8m/s2もスタート条件は重要ではありませんでした。
<シミュレーション その1 制限条件なし>
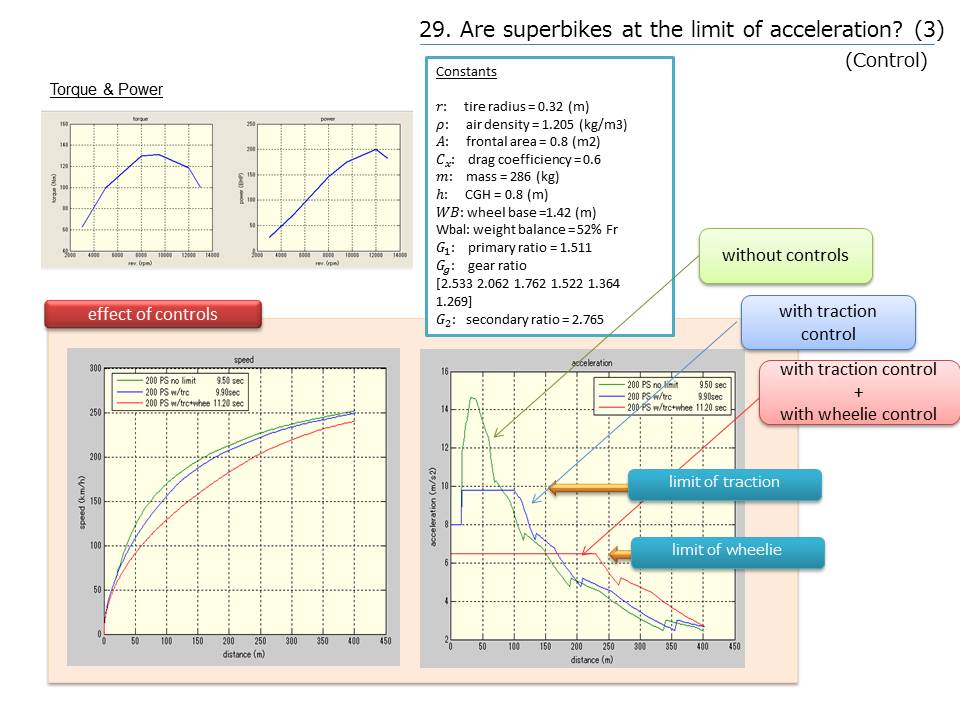
じゃあできたモデルで加速試験してみましょう、使用した数値は図の通りです、ギヤ比、重量等はヤマハR1の値を使いました。専門外なので重心高、空気抵抗係数などは推定です、それほど外していないと思いますがこれを見てる2輪メーカーのあなた!「うちのGxxのCxはXXXだよ」「Cxxの重心高(ライダー込)はXXmだよ」等の情報お待ちしています。
エンジントルクもネットで見つけてきたR1のダイナモデータを基に作りました、なぜCBRでもなくH2Rでもないのか?趣味ですから好みですね、ピークパワーに直すと約200馬力でした(グラフの青線)。
計算にはエンジントルクデータそのものを使いました、つまりいつもスロットル全開です、実際のリッタースーパースポーツでは無理でしょうが。
さて0-400mシミュレーションの結果タイムは9.50秒です、速度のグラフで緑の線ですありえないくらい速いですね。そりゃそうです、ありえないですから。
このモデルではホイールスピンもしないしウィリーもしません、スロットル全開トルクで猛然と加速していきます。
実際の状況はちょっと前ならライダーの絶妙なクラッチ、スロットル操作でスピン、ウィーリーをコントロールしたでしょう、今はローンチコントロールがそれをやってくれます。
今回もローンチコントロールを取り入れないと現実的とは言えません。
<シミュレーション その2
公道タイヤのトラクションには限界があります、乗用車の最大減速Gは1Gまでです、加速も同じです。 2輪も同じでしょうという事で加速度に制限をつけます、言ってみればトラクションコントロールあるいはローンチコントロールです。
とはいえここでは簡単に加速度が1G, 9.8m/s2を超えないようにするだけです、エンジントルクによる加速度が9.8を超えたら9.8に置き換えます、完璧なローンチコントロール状態と言っていいでしょう。
ちなみにレーシングカーでF1とかスーパーフォーミュラだと最大減速Gが4Gから5G位は出ますがそれはダウンフォースのおかげです、ダウンフォースの非常に少ないピットストップなんかでは1.3Gいかないくらいじゃないですか?競争ですからピットストップとはいえ頑張って止まろうとしてるわけですがダウンフォースがなければいくらレース用タイヤといえどそのくらいという事です、スーパーフォーミュラのスタートでも1.3G位です想像するほどすごくないでしょ。
さらに停止から1Gで加速し続けたら100km/hまで2.83秒です、つまりこれが公道での2輪4輪問わず 0-100km/hのほぼ限界といえます。
話を戻して加速シミュレーションの結果です、加速度のグラフで青の線が9.8で頭打ちになっているのが分かります、これが駆動の限界という事です、速度のグラフでも青の線で9.90秒です、0.4秒落ちましたがそれほどの差ではありませんでした。
<シミュレーション その3 ウィリー限界取り入れ>
4輪と違って2輪は重心が高くてホイールベースが短いので高G加速ではどうしてもウィリーしてしまいます。リッターバイクによるホビーレースのスタートなんか危なくて見てられません。
ウィリー始めたらそれ以上加速度を上げられません、ひっくり返ってしまいます。そして前輪が高く浮き上がり車体が後傾していくほど後輪から重心までの水平距離が短くなりますから持ち上げるための必要トルクは低くなります。最終的には重心が後輪の真上まで来たらもうトルクは必要なしでサオ立ち状態となります。
よくちょっと上がったくらいが一番いい加速みたいなことを書いてる人がいますがそんなはずはないですね、前輪が離地するかしないかを保つのが一番です、でも地味ですからちょっと浮いてる方がかっこいいですね。
というわけでウィリー制御ですがこれも簡単に前輪荷重がゼロ以下になる時はトルクがありすぎですからウィリー始めるギリギリまでトルクを下げます、つまりは加速度を前輪荷重ゼロになる値で置き換えます。
実際には前々回の(8)の前輪荷重の式でこれがゼロ以下になる時はウィリー状態ですからゼロに等しくなるように駆動力Fをさげてやります、これで過大なトルクを抑えてリフトギリギリを保つことができます。
さていよいよ制御も入った完成形の結果です、11.20秒です、ずーいぶん遅くなっちゃいました、でもこれで現実的な値になったと思います。
加速度のグラフを見るとウィリー時の加速度は6.5m/s2(0.66G)です、低いですね。これがスタートの8m/s2が重要でないといった理由です、スタートで頑張って加速しようとするとウィリーしちゃうのでウィリーしないように加速するのが最速のスタートなのです。
そしてそれは250m手前、200キロ弱まで続くのです、ギヤで言うと3速に入ってちょっとまでです、すごいですねー3速までウィリーするんですか。
これでスタートと制御を盛り込んだモデルがやっと出来上がりました。
さーパワー違いで比較、と思ったのですがすでに長くなったので次回に