19. < 走行軌跡を描く+ (1) >
前回は車両を1つの点としてその軌跡を描きました、今回は+ということで正確にさらに車の向きも表示します。
前回出てきた「進む」と「向きを変える」は基本変わりません、でも今回はセンサーが違います前回は一番シンプルなセンサーで走行軌跡を描くというのが目的でしたが今回は正確な走行軌跡と車両方向を描くのが目的です。
まずは「進む」です、前回は今の位置から次の位置への距離だけでしたが今回は2つの方向に分けて計測します。
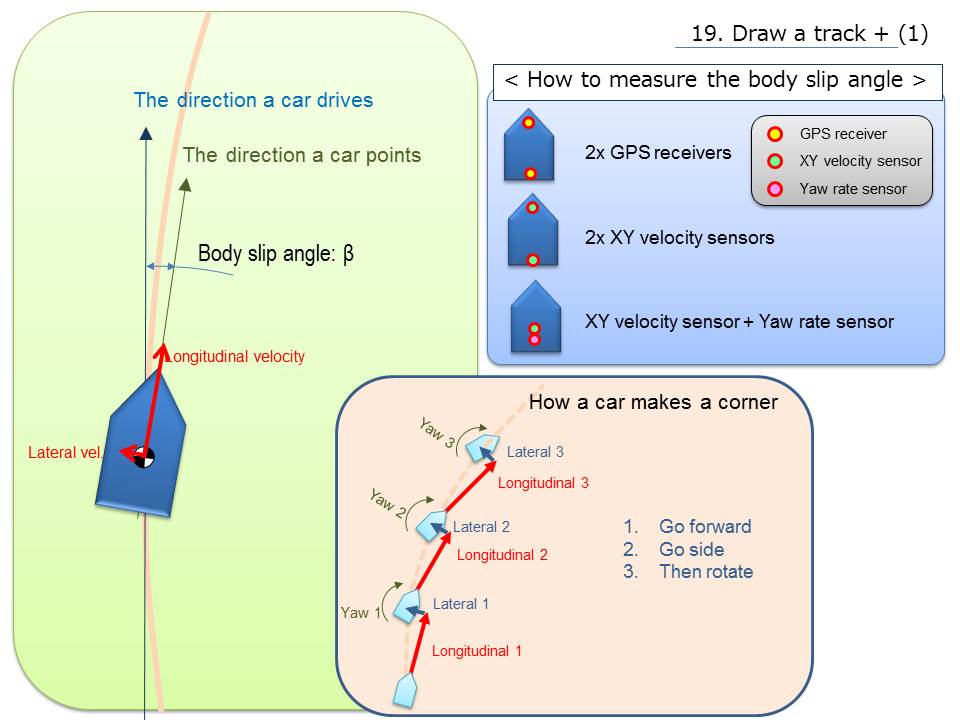
車両がコーナーを走っている時、車の向いてる方向と車の進んでいく向きにはずれがあります、ずれっていっても数度程度のもんですがあるんです。
前輪はステアリングを切ってタイヤの向きを変えてコーナリングフォースが生まれますが後輪だってステアしてあげないとコーナリングフォースが発生しません。
後輪にはステアリングが付いていないので(4輪操舵はついてますが)車両ごと回してあげないといけません、だからコーナリング中は車両は円の接線より内側を向いています。
その角度を重心スリップ角といいます、この名前が曲者でして車両が内向きでコーナリングしてその角度がスリップ角っていうともう車がドリフトしてる状態が頭に浮かんで離れない人がたくさんいます、車両運動性能をやってる人いわゆる vehicle dynamist って言われる人でさえドリフト状態に囚われちゃってる人がいます。
違いますからね、「滑る」っていうより「こねくりながらずれる」っていう イメージですからね。
車はほんのちょっととはいえ斜め方向に進んでるわけで車の軸方向で言えば前後方向と左右方向にも進んでることになります、前移動と横移動をたして斜め移動ってことです、これを前後速度、横速度と言います。
前後速度、横速度を直接測っちゃう計測器があります、一つはコレビットでおなじみの光学式の対地速度計です、お高い、すごくお高い機械です、もう一つはGPSです昔は精度とサンプリングレートが低くて使い物にならなかったですが今はDGPSとか使って実用レベルだと思います。
ここではコレビットで話を続けます。
次に「向きを変える」です。
より精度よく測れる方法を今回は使います、一つはヨーレイトセンサーです、車の回転速度を直接測れる装置です、これも昔は高価でしたが今は量産車に使われるくらい普及してきました、車が向きを変える回転方向の動きを「ヨー(yaw)」と言います。 もう一つは上のコレビットを2つ使って2つの横速度の差とセンサーの距離からヨーレイトを求める方法です、ただでさえ高いコレビットを2つ使うのでよっぽどの金持ちしかやりません。
さてコレビットとヨーレイトセンサーで「進む」と「向きを変える」は測れました、ここでちょっと注意が必要です、コレビットは重心位置に置かないといけません、重心位置から離れて置く場合はヨーの回転運動をコレビットが拾ってしまうので補正しないといけません。
以上のセンサーを使って車はどうやってコーナーを曲がっていくか分かります。
• 前へ進む
• 横へ進む
• 車が回転する
これを繰り返して曲がっていくのです。
さてそのプロットの例は次回に。