18. < 走行軌跡を描く >
モーターファンイラストレーテッドvol. 98 「ばね下完全理解」という雑誌が出たので「おっサスペンションについてだ」と買ったんですがやめておけばよかったと思いました。ダンパー、スプリングのページではいろいろ“?“のつく記述があり「図解、自動車のテクノロジー」を標榜しているにしてはお粗末だと思います。
モノチューブダンパーに10MPaのガスなんて入っていません、使い慣れないSI単位を使うもんで10Mpaがどれくらいかぱっとイメージできなくて書いちゃったんでしょうが100気圧って書いてたら違うってすぐ分かったでしょうに。
あくまで雑誌だと思って読まないといけません。雑誌に1600円は高いと思いますが。
さて今回は走行軌跡を計算する方法についてです、今書いておかないともうすぐ(もうすでに)必要でなくなってしまう知識でしょうから。
今やiPhoneでも自分の走った軌跡を描かせるのは簡単です、でもGPSが発達してなかったころは車両データから計算しないといけませんでした。
レース用のデータロガーのソフトには必ずサーキットのコース図が画面の端にあってデータのコーナーにカーソルを持って行くとコース図のそのコーナーにポインターが移動するようになってるんですが、そのコース図を車両のデータから作れるようになっているんです。
ソフトの中のデータからコース図を作るための画面に行くと何の信号で計算するか指定するようになっていて大概は車速と横Gです。
車速と横Gだけでどうやってコース図が一周分きれいに描けるのか不思議でしたが実際に式を立ててみるとそんなに大それた計算はしていません、回数が多いだけです。
では車速と横Gからサーキットのコース図を計算する方法です。
まずは計測ですが車速と横Gを細かい時間きざみで記録しながら(20-50Hz)コースを1周します。
するとデータには計測が20Hzなら0.05秒ごとの車速と横Gが記録されています、すごく細かいですね。 これくらい細かいと一つの点から次の点までは直線運動として扱ってかまいません、例えば直線を繋いで円を書いたらカクカクしちゃいますがその直線がすごく短くてたくさんだったら円は滑らかになっていきます。
それと同じことをしようという事です。
まず車は0.05秒ごとにどう動いているか?
たとえばコーナーでは前に進みながら向きを変えているわけですが、その2つを別々にすると「前に進む」と「向きを変える」です。
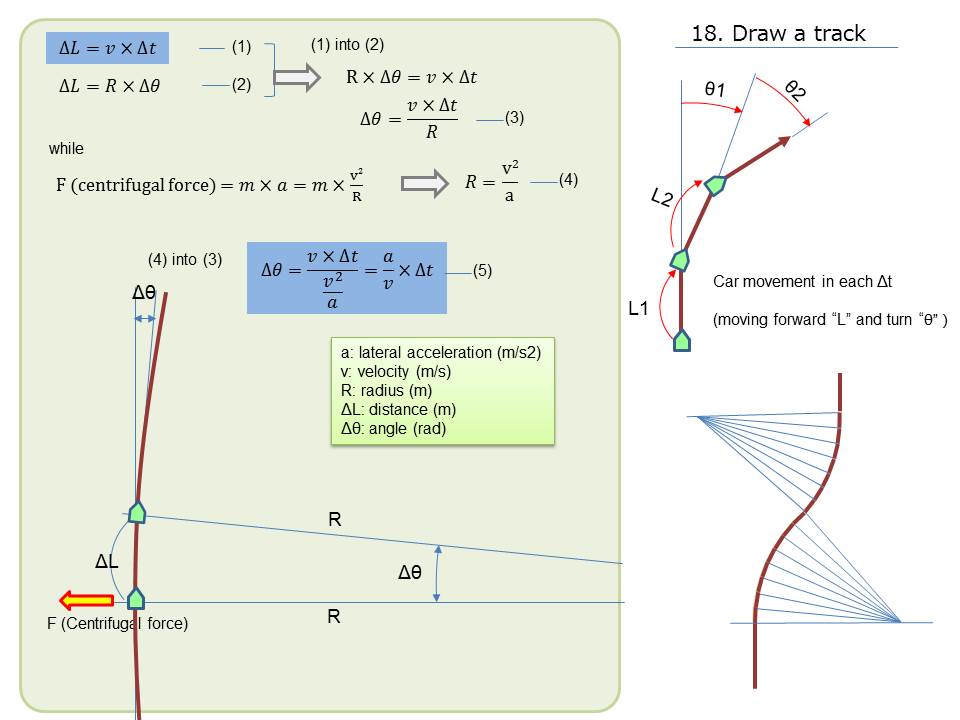
右上の図のように「進む」「向きを変える」「進む」「向きを変える」...を繰り返して一つのコーナーを曲がり、一周を回るのです、上に書いたように一刻みごとは直線ですが細かいので滑らかになります。
コース図を描くには「どれだけ進んで」「どれだけ向きを変えたか」を各計測刻み(Δt)ごとに計算して繋いでいけばいいのです。
まずはどれだけ進んだか(ΔL)です、これは簡単です、速度に時間を掛けるだけです、式(1)がそうです。
次はどれだけ向きを変えたかです、これには高校の数学で習った L=Rθを使います、って言っても高校でラジアンが出てきたころにはもうすっかりお手上げだった人もいるでしょうが。
まあそういうもんだと思ってください、左下の図にあるように半径Rの円周の何度分(Δθ)回ったかが「どれくらい向きを変えたか」になります、 式は(2)です、この式(2)の中でΔLはもう式(1)で求めました、0.02秒で車が進んだ距離です、これを式(2)に代入して式(3)が求められました。
Rがいまだ不明です、これには遠心力の式を使います、やっぱり高校の物理で習いましたね、式(4)です、遠心力は 速度の2乗に比例してコーナーの半径に反比例ってやつですね。
遠心力の式を変形して半径Rが速度と横Gで表されました。
(4)の半径を(3)に代入して式(5)の角度、どれだけ向きを変えたかが求められました。
ここで角度はラジアンですからねー、2πラジアンが360°ですよー。
さあ式(1)と(5)の「進む」と「向きを変える」をΔtの0.02秒ごとに計算して次々に足していけばコース図が出来上がります。
直線は? 半径無限大のコーナーとなります。
実際には横Gセンサーのオフセットがあったりするので1ラップの最初と最後がうまくつながらず折れ曲がったりずれたりします、それの補正をしないといけませんが基本の理論は上記の通りです、各レース用データロガーソフトがやっているのもこれの通りです。
これからやってみようって言う人はいないと思いますが車がどう曲がっていくのか理解する第一歩になります。
ちなみに使うデータはゆっくり走ってるラップの方がきれいに描けます、というのはスライドは横Gに現れないのでたとえば大きくテールスライドして向きが変わっても横Gにはそれだけの変化は現れません。