53. < 逆操舵なのか >
やはり2輪の旋回の難しいところは車体がリーンすることです、4輪の旋回はステアリング入力というドライバーからの入力があって始まりますが2輪はいきなりハンドル切ったらすっ飛んで行ってしまいます。
でもハンドルは切れてないと旋回はできませんから切れるんですけどこれがバイクのリーンに連動しているのが厄介です。
リーンするから舵角がつくのか? 逆操舵するからリーンするのか? みたいな議論がだいぶ前に盛んにされていたようです、それで今回のお題は逆操舵です。
ここは妄想を語り合う場ではないのできちんとデータを取りましょう、ということで私自身のバイクに舵角センサー付けて走ってみました。
バイクはCBR150ミニバイクレース用です、写真のようなリニアポットで舵角を測ります、きちんと較正しましょう。
バンク角も取りたいのでIMUをシート下へ取り付けました、ボッシュモータースポーツで市販されていますが市販バイクにコーナリングABS用についているものと同じですから純正部品で買ったほうがきっと安いですね。
https://www.bosch-motorsport.com/content/downloads/Raceparts/en-GB/51546379119226251.html
CANセンサーですのでIDが分からないと信号が読めないですが上記のカタログにIDが書いてあります。
これらをアナログ、CANの入力できるロガーで記録します、私はAthenaのGET M40 という物を使っていますがもう廃番になっちゃってるようです、ロガーは高いのでなかなか手が出ませんがあるといろいろ分かることがあるし走った後にあーだこーだ楽しめるのでお勧めです。
さてこれで測定はできますがIMUが測るのはロールレイト(速度)であってロール角ではありませんから積分してあげないといけません、ロガーについてくる解析ソフトの演算チャンネルでも四則演算とか積分とかできますがちょっと込み入ったことをしようとするとうまくいかないのでASCに変換してMatlabなりPythonで読み込んで後処理したほうが簡単です。
と簡単に書きましたが経験のない人がセンサー、ロガー、実走行、後処理とそれぞれ面倒なこをこなして結果にたどり着くのは難しいかもしれませんが妄想の応酬から脱するにはやらないとですね。
さらに2輪の測定で気をつけないといけないのはリーンによってセンサー軸が地面軸からずれてしまうことです、例えば車体につけた横Gセンサーはバンクしていくと縦Gが入ってきてしまいます、横Gと重力の合成が上下Gとして掛かります、ピッチレートセンサーはバンクしていくとヨーレイトが入ってきてしまいます。
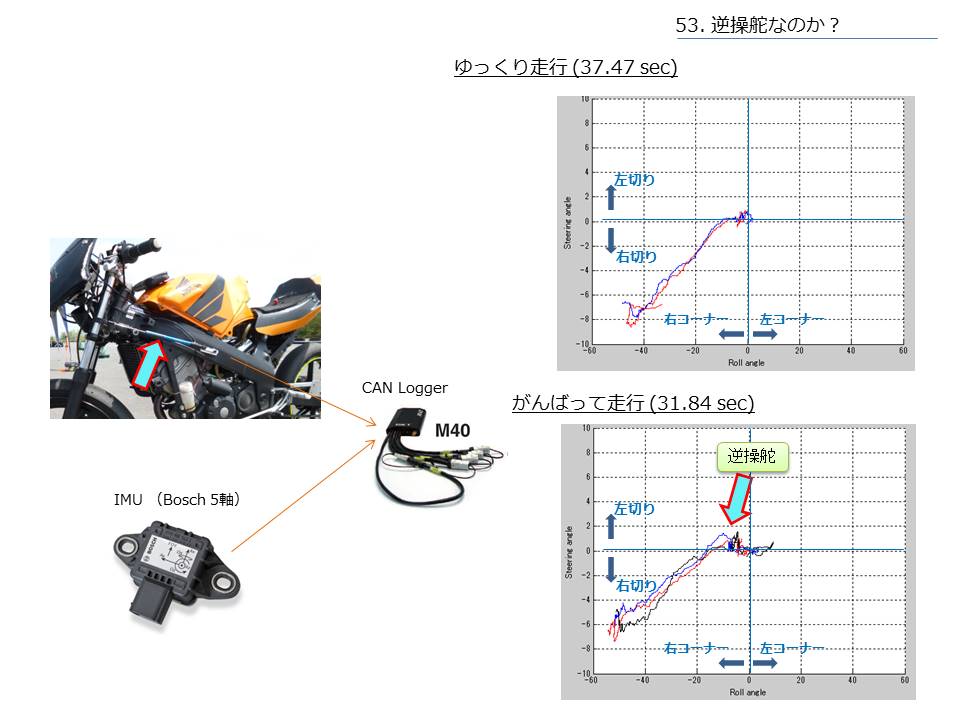
さて上記セットアップで富士のカートコースを走りました、図にロール角に対する舵角のデータを2つ出していますが1つはウォームアップでゆーっくりリーンウィズで走った時の物、もう一つはがんばって走った時の物です、タイムで6秒以上違いますからかなりスピードは違います、でもほぼ同じラインを走っています。
つまりゆっくり走ったほうは加速、減速、リーンすべてがゆっくり行っているということです、リーンアングルが少ないということでもありませんコーナーで遅いとはいえ40°くらいは寝かしています、リーンウィズですしね。
データは直線から1コーナーへ入っていく時のロール角に対する舵角です、他のコーナーでは直線がないので単純なターンインの計測ができませんでした、複数ラップ計測しているので色を変えてあります。
基本は左コーナーで信号が“+”になるようにしていますので右コーナーである1コーナーではロール角も舵角も“-”です。
さて結果のデータを見てみましょう、逆操舵があるとすれば右コーナーに対して左に切れるわけですから線が第2象限に入って行くはずですね、第2象限はいいですか?グラフの左上の区画です。
ゆっくり走行では逆操舵は見られませんでした、ちょっとタメがあるようにはみえますが逆には切れていません。
ではがんばったほうはどうでしょう? 逆に切れていますね、矢印のところです。 がんばると逆操舵になるのでしょうか?
速くリーンさせようとして逆操舵になっているんでしょうか? 乗ってる本人は切っている感覚はありません。
実は別の機会にも舵角を計測したことがあります、もっと公道走行を模擬した走行パターンでした。
これらの結果からすると通常のコーナリングでは逆方向に操舵されることはほぼありません。
しかし速いレーンチェンジ、細かいスラロームの入り口などでは逆操が見られます、つまり速いリーンをするためには逆操舵が必要なようです。 速いスラロームの入り口ではフェイントモーションというか逆方向にバイクを一瞬振ってから寝かしこむ動きも見られます、4輪でもラリーとかでやりますよね一瞬逆に切ってから切り込んでいくフェイントモーションです、これも回頭性を上げるためのものです。
つまり逆操舵はフェイントモーションのすごく小さいの、軽いのといってもいいと思います。
まとめると通常のすーっと入って行くようなコーナリングでは逆操舵はありません、リーン速度を上げていってスパンと倒しこむようなコーナリングになると逆操舵が現れ始めます。
スパンと倒しこむから逆に切れるのか、逆に切るからスパンと倒れるのか、このメカニズムについてはまだよく説明できませんので今回は現象についてのみということで。
これをライダーが意識してやっているかどうかは難しいところですね、意識しているとすれば当て舵といわれるやり方だと思います、 それも直進から逆方向に押すのではなくリーンして切れてくるのを抑えるっていう感じの舵力入力です。 ほんとに逆操舵してる人はいないんじゃないですか?
舵力も測れるともっとよくわかるのにとは思うんですがこれは難しいですね。
あともう一つ言っておかないといけないのは逆操舵してその逆操舵のまま倒れこんで定常に入ったら順方向へハンドルが切れると思っている人がいるみたいですがそんなことはありません、図を見れば明らかなように寝かしていくに従って舵角も増えていきます、ここについては次回で解説します。