41. < チェーン駆動のアンチスクォート(正解版)(1) >
第16回でチェーン駆動のアンチスクォートの+/-が間違っていたと改訂をしましたが実は間違っていませんでした。
第16回の方は<再改定>として訂正してします、すいませんでした。
それでもアンチスクォート力はスイングアーム角とチェーン角の関数ですっきりしないし、よく本や雑誌に出てくるスイングアームとチェーンを延長した交点と接地点との角度(図のβ)で表される式と全然違います。
いろいろ調べたんですがどこにもどうして交点(図のX)からの角度βになるのかの解説は見つかりませんでした。
いまいち自分の式には自信がないしみんなの使ってるβの式を理解もしていないのに使うのも納得できないし
ということでずっと考えてたんですがやっと理解できたので同じことを考えてる全国16人くらいの人と共有したいと思います。
はじめから順を追って説明していきます。
駆動反力をスイングアームで受けるかシャシで受けるか、これによってアンチスクォート効果は大きく変わってくるのは第14回で書いた通りです。じゃあチェーンは?というのが大きな疑問でした。
まあチェーンとスイングアームの角度からして多少駆動反力はスイングアームにかかるだろう、つまり受ける受けないの間のどこかになるだろうなぁとは想像できるわけです。
そしてβも両者の間の値になりますからきっと合ってるんだろうなぁとは思うわけです。
では説明です。
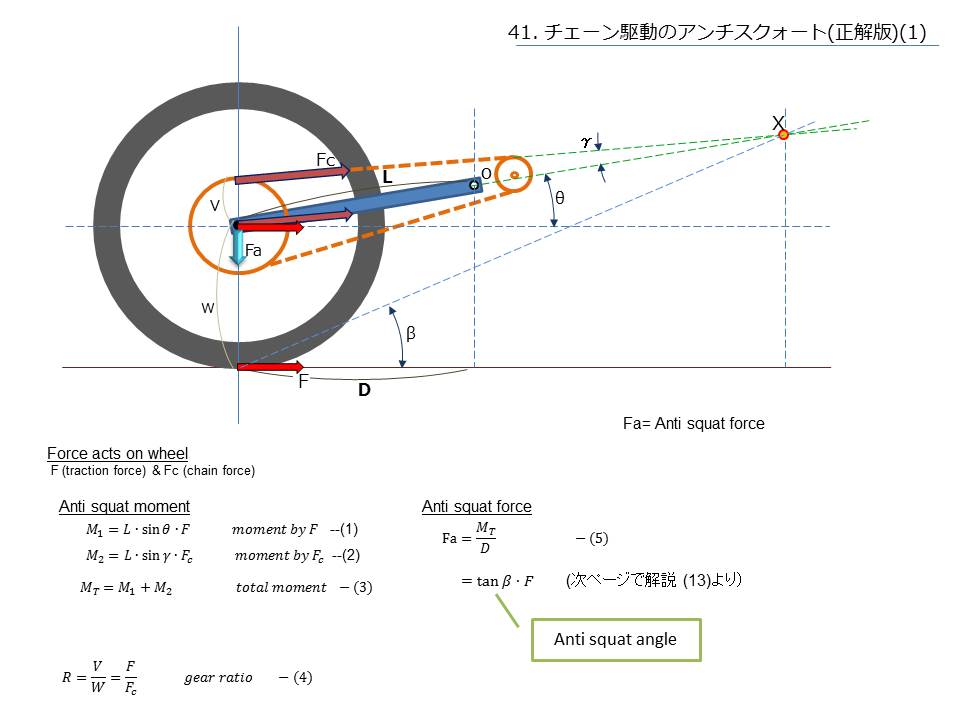
アンチスクォートモーメントは駆動力とチェーン力によるスイングアームを回そうとするモーメントです、(1)が駆動力によるモーメント、(2)がチェーン力によるモーメントです (3)は合計です、第16回と同じです、そうなんです合ってるんです、でも分かりにくいんです。
(4)はチェーン力と駆動力の比はスプロケットとタイヤの径の比に等しいということを言っています。
アンチスクォーと力はアンチスクォートモーメントを腕の長さDで割った物です (5)
そして第16回で求めたアンチスクォート力の式を中学で習った数学を駆使してβの式に変形することができました、その過程は次回で説明します。
これで胸を張ってチェーン駆動のアンチスクォート力はスイングアームとチェーンの交点Xから接地点へ引いた線の角度βの関数である、と言えます。
私的にはこれは画期的なことなんですけどまあ多くの人にはあまり興味ない事かもしれません、でも「理屈は分からないけどチェーンのアンチスクォートはβ」っていうより「理屈はあそこに書いてあるのを知っているからβを使う」の方が安心だし自信が持てるでしょう、何も全部自分で解く必要はないわけですし。
アンチダイブ、アンチスクォートについては実際どれくらい働いているのかわからない人が多いと思います。
私もBMWの1200GSに去年初めて乗って「これがテレレバーか」とアンチダイブの違いを感じる事が出来ました。
アンチスクォートも昔のシャフトドライブのバイクに乗れば感じる事が出来るでしょうが今はほとんどのバイクがテレスコフォークにチェーン駆動ですから極端な違いはありません。
でもチェーン駆動でも結構アンチスクォートは効いていることが分かったので解説したいと思います。